Eric Kim
Torque Testing Rig
Prior Research and Literature Review
To get to the point of designing a testing rig, I needed to prove my design decisions. Using literature, I calculated the expected torque a burrowing robot would experience in excavating material ranging from sandy to icy. I also ensured the components on this test rig would not break with stress calculations at key components, such as the motor post.
Functional Analysis
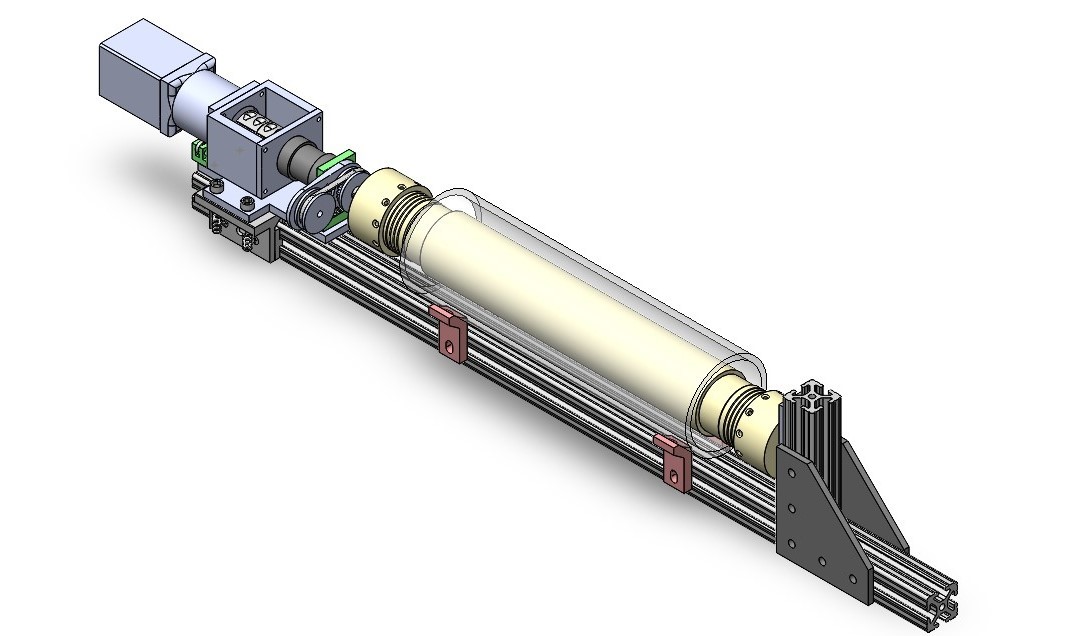
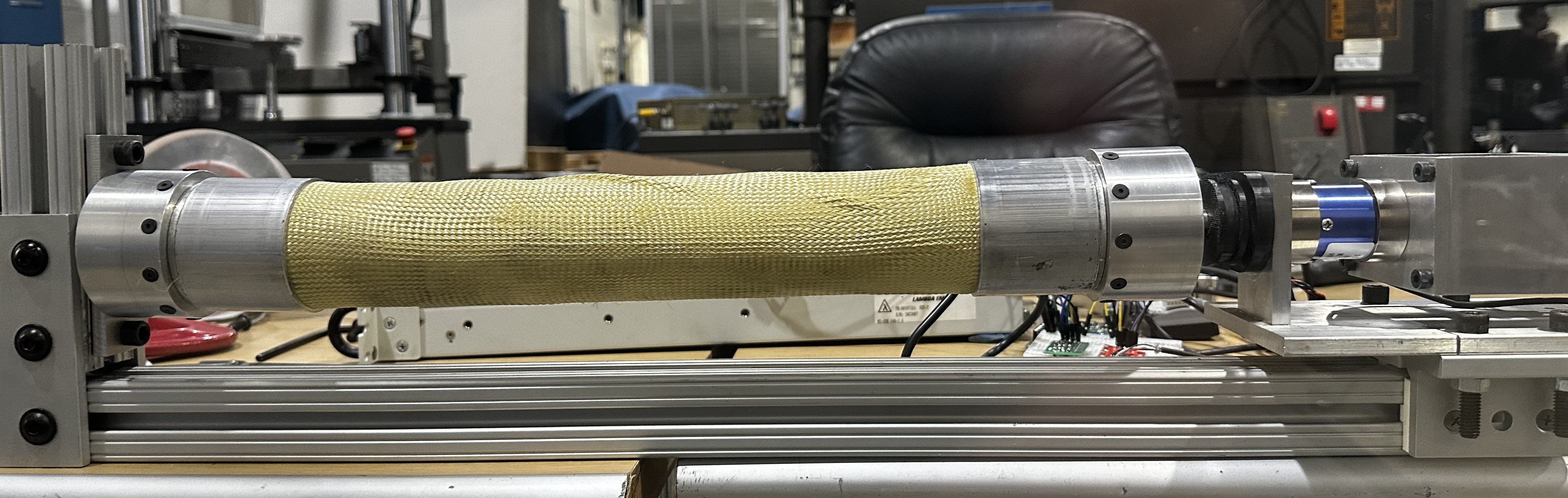
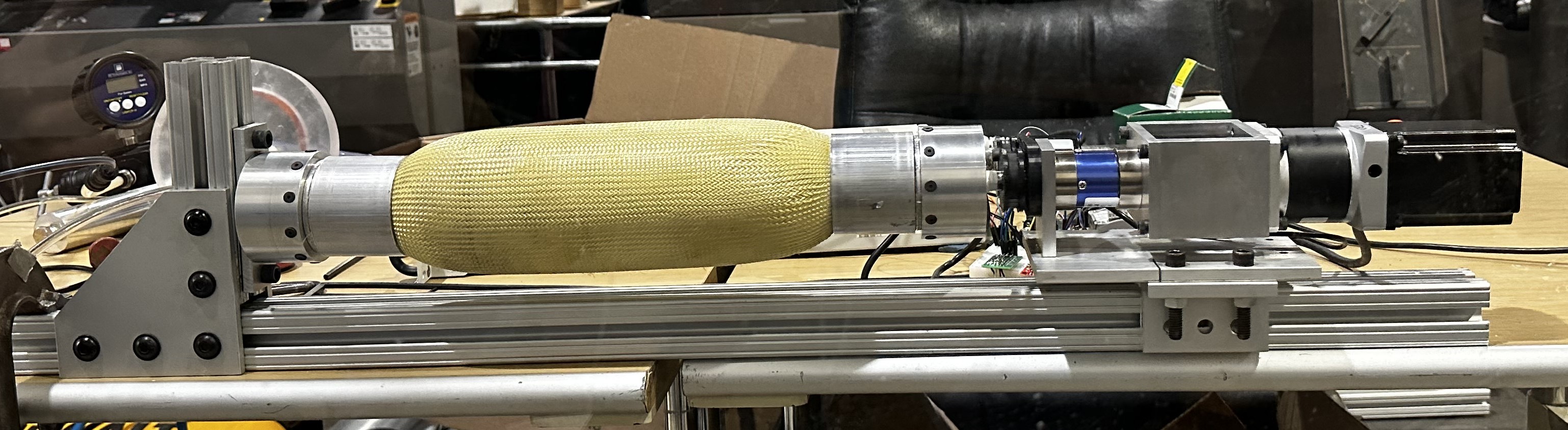
Pneumatic Artificial Muscles (PAMs) have stiffness against torsion, which is related to how much it is pressurized. At multiple pressures, I was able to extrapolate the maximum torque the muscle could react with a torisonal testing rig.
The torsional rig parts were designed and analyzed to deliver a maximum amount of torque equivalent to what the robot would experience while digging in sandy or icy environments. Additionally, I needed to interface with an array of sensors for data collection, and I controlled the experiment with a large stepper motor. An arduino integrated all the electronics to a custom interface, which I had programmed from scratch. All this was needed because the sensor suite and data collected was unique.